要素技術-1 ストレススキン翼の開発
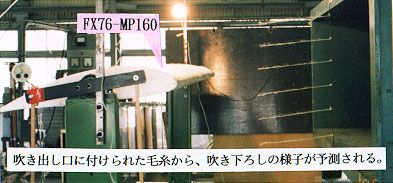
ストレススキンは、航空機で最も発展・成功した軽量化と高剛性化に必須の構造です。特に主翼のような流線型の断面で、最も外部に有る部材を構造材に用いると、常にその回転半径が最大値を得るからです。当然人力飛行機にも採用されるべきながら、構造解析の難解さや高度な工作技術、品質管理、膨大な製作手間等から敬遠されてきました。私達の試算では、構造効率は汎用人力飛行機が採用する一本のCFRPパイプに全ての応力を負担させる単桁構造に比べると、優に一桁上の値を示します。開発に当たっては6体の実大翼を製作し、荷重試験と風洞実験を繰り返し、構造解析との整合性の追求の末、実用化に至りました。空力面では、フイルム貼りの汎用人力飛行機に比べて飛行中に翼型が変形しない為、翼効率が低下しないメリットも大きいと思います。
風洞実験の様子
製作上の注意点に、表面の仕上げ精度(滑らかさ)の問題があります。一般に汎用人力飛行機の主翼は、ポリプロピレン等のフイルムでカバーされています。このフイルムの採用が汎用人力飛行機の性能向上に大きく貢献(スチレンペーパー等でプランクした為に、正確に翼断面の形状を維持出来ない翼の性能の低下防止に貢献)しています。例えば、最近よく見かけるジャンボ機の胴体にキャラクターマークを塗装した表面と、フイルム仕上げの表面の摩擦抵抗を比較しますと、フイルム仕上げの方が一桁下の値を示します。フイルム表面の摩擦係数は、車の塗装(コンパウンドで磨いて、ワックス掛けで仕上げた表面)面よりも遥かに小さいと言うことです。ストレススキン翼を手がけた場合、その表面仕上げには、仕上げ材料の選定と仕上げ手法、各工作段階での品質管理値の設定等に十二分な配慮が必要です。

風洞実験の様子
要素技術-2 上反角旋回(Dihedral turn)
人力飛行機の旋回方法は、コーディネイト・ターンとウイングレベル・ターンに大別できます。ウイングレベル・ターンは、常にサイドスリップしながら旋回するコーディネイト・ターンに比べて、20%以上も必要パワーを費やし、今回の計画には適用しかねます。
上反角旋回(Dihedral
turn)は、低出力でパワーロスの少ない高効率な“緩旋回”を目指して開発した旋回制御法で、CHicK-2000が半径約200m、対気速度8.0m/sで旋回する事を条件に開発しました。
制御手順は、以下によります。
①所望の旋回方向に主翼を傾ける(左右が一対の繋がった飛行張線を準備し、旋回方向の
飛行張線を短く、反対側を長く制御し、主翼を胴体軸の周りに回転させます。回転角は
±2°を限度とし、下がった方の主翼の上反角は0°(水平)を下回らない範囲とします)。
②エルロンの代わりに、空力弾性を活用して主翼を捻ります。
旋回飛行中の釣り合いを図示します(要素技術-3)。
主翼の捻り機構
要素技術-3
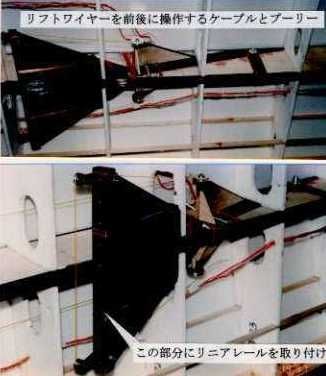
空力弾性を活用した主翼の捻り制御機構
旋回飛行中に主翼に生じる速度勾配は、機体にローリング・モーメントを発生させます。釣り合い旋回(コーディネイト・ターン)の達成には、左右の主翼の揚力によるローリングモーメントが吊り合わなければなりません。速度勾配によって生じたローリングモーメントを打ち消すために、主翼の空力弾性変形を活用して主翼を捻ります(左右の主翼の迎角を調整します)。制御方法は、飛行張線の主翼側取り付け位置(支点)を前又は後に移動させ、風圧中心と弾性軸の距離の変化により、支点周りの回転モーメントを制御し、主翼を捻ります。
制御手法としては、MITの“ミシェロブ・ライト・イーグル”号が採用したオールムービング・エルロンの方が扱いが簡単です。ライト兄弟が開発した捻り機構と同様に主翼を捻りますが、その制御手法は全く種を異にします。

捻り制御の性能試験
主翼側取り付け部

リフトワイヤー取り付け
要素技術-4 “ジャンピングクライム法”の検証
“ジャンピングクライム法”は人力飛行機で実践されている、パワーロスが少なく且つパイロットの持続時間継続に有効な上昇方法です。この上昇方法は、通常の航空機が行う上昇角一定の巡航上昇方法とは異なり、昇降舵操作による約1mの上昇を数回のステップを繰り返し、階段状に目標とする飛行高度に到達する上昇方法です。“ジャンピングクライム法”について、飛行力学に基づいた運動シミュレーション、および必要パワーと持続時間との関係の2つの観点から検証を行ないました。
(1)
飛行力学に基づいた運動シミュレーション
“ジャンピングクライム法”による人力飛行機の運動が、飛行力学的に妥当であることを検証するため、運動シミュレーションを行ないました。定常運動まわりの微小擾乱による動的運動の場合に成り立つ機体の縦の運動方程式をたて、空気の見かけの質量(付加質量)と地面効果を考慮しました。その結果、推進力を0とした状態で昇降舵の舵角を実機と同様に操作入力を行った場合に、機体の高度は約1m上昇することが計算結果として得られ、実機の動作とほぼ一致することを確認しました。基礎理論と計算手法の解説を(解説-1)に示します。
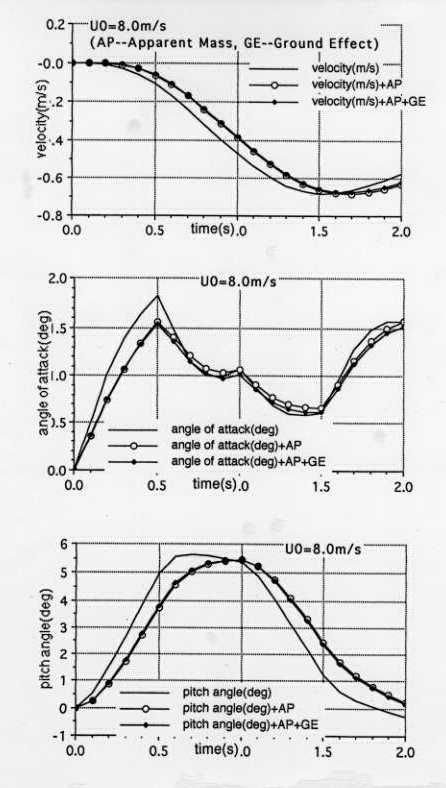
シミュレーション結果・水平速度、迎角、ピッチ角
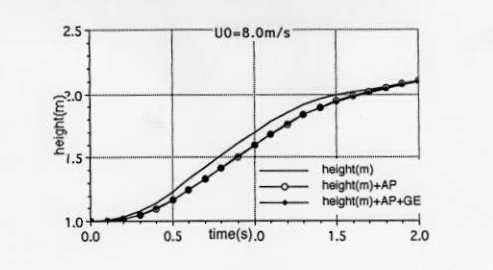
シミュレーション結果・高度
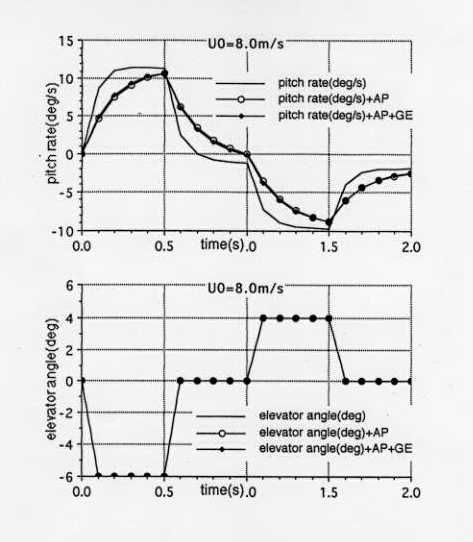
シミュレーション結果・ピッチ角速度、昇降舵角
【非定常上昇飛行方法“ジャンピング・クライム法”の手順と操作】
“ジャンピング・クライム法”の手順を以下に示します。獲得高度約5mの場合には離陸を含む以下の手順を3~4回繰り返し、その高度に達することを目標とします。1回のジャンプで約1mの高度を時間約1.5秒にて得ます。
① 定常水平直線飛行において水平状態を維持しつつ飛行速度を増速させる。
② 昇降舵をアップさせて機体を上昇状態へ移行させる。
(昇降舵操作:-6deg程度、操作開始を0秒として0~0.5秒間)
③ 機体の姿勢が上昇状態に傾くと昇降舵を中立状態に戻す。
(昇降舵操作: 0deg程度、操作開始を0秒として0.5~1.0秒間)
④ 機体が所定の高度(約1m)までに上昇し、所定の速度まで減速する直前に昇降舵をダウンさせて機体を水平飛行に移行させる。
(昇降舵操作: 4deg程度、操作開始を0秒として1.0~1.5秒間)
(2)
必要パワーと持続時間との関係に関する考察
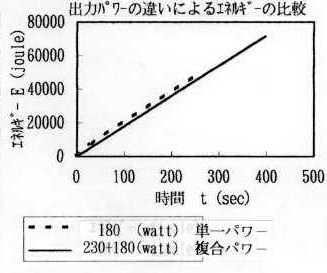
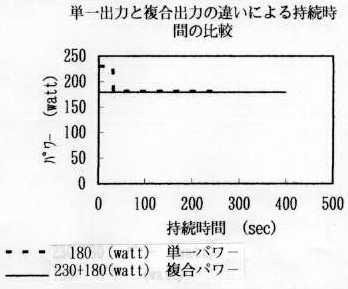
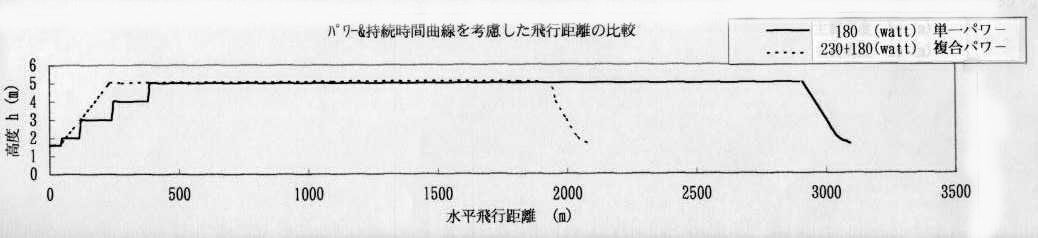
巡航上昇の場合の飛行と“ジャンピング・クライム法”で上昇した場合の飛行について、それぞれの必要パワーと持続時間、更にはそれらの積である必要エネルギーとの関係について比較検討を行ないました。獲得高度5mに対する上昇時のみを考えると、必要エネルギーは1°の上昇角による巡航上昇時には7485J、ジャンピングクライム時には9905Jとなり、ジャンピングクライムを行った場合の方が不利になります。しかし、エンジンとしてのパイロットの特性である、“パワー&持続時間曲線”を考慮しますと、出力パワーが230W+180Wの複合パワーの場合(230Wは1°の上昇角による巡航上昇時に対応)と180Wの単一パワーの場合では、後者の方が持続時間とエネルギー量は大きくなります。これらを考慮して、パイロットが疲労困憊(ALL
OUT)になる20秒前に定常水平飛行から滑らかに降下した後着陸する場合の飛行距離は、1°の上昇角による巡航上昇時には2088m、ジャンピングクライム時には3094mとなり、ジャンピングクライムを行った場合の方が逆転して有利になります。これにより必要パワーと持続時間との観点からジャンピングクライムを行った場合の有効性を確認しました。

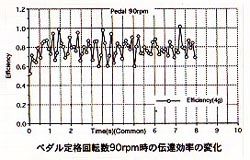
伝達効率の測定
要素技術-5 伝達効率の測定
CHicK-2000の動力伝達装置には、構造の単純化と軽量化のためチェーン・ドライブ方式を適用していますが、この方式ではペダルとプロペラとの間でチェーンが90°捻った状態で駆動されます。伝達効率はスプロケットの軸間距離、チェーンの張力あるいは回転数により異なります。これまで捻りチェーン方式は多くの人力飛行機に採用されてきましたが、その伝達効率については未知数でした。今回私達は高品位な人力飛行機CHicK-2000を設計・製作するに当たって、高い精度で伝達効率を把握しておく必要に迫られました。そこで実際の値を把握するために実機を用いた測定を行ないました。効率測定は、ペダル側のパワーとプロペラ側のパワーを測定し、これらを比較計算する事によりました。ペダル側のパワーは、歪みゲージにより、右足・左足の曲げモーメント及び光電センサによるペダル回転数を測定します。プロペラ側のパワーは、4ゲージ法とした歪みゲージによるプロペラ軸の捻りトルク及び光電センサによるペダル回転数を測定します。ペダル回転数を90rpmとした場合の回転数、トルク及びパワーの測定結果、及びペダル回転数を70,80,90,100rpmとした場合の伝達効率の測定結果を表-5.1に示します。
測定結果から定常飛行時のペダルの定格回転数90rpmにおける伝達効率は、およそ0.8でした。その後フレームの剛性向上、プロペラ軸の芯振れの改良で値は更に向上しました。左右の足のトルクを比較しますと、最大値は数割程度右足のトルクが大きく、これがチェーンの駆動方向以外の振動を生じさせ、伝達効率の低下の一因になっていると推測されます。また、伝達効率の値がペダル回転数の増加に伴って良くなるのは、速度が上がるとチェーンの駆動方向以外の振動が小さくなり、パワーロスが少なくなっているからと推測されます。

要素技術-6 フライトデーター収集システムの開発
機体の性能把握と、効果的な調整、今後人力飛行機を設計するに当たっての基礎データの取得と蓄積に、フライトデータ収集システムを開発しました。本システムの計測装置は、対気速度計、回転数計、ピッチ角計、高度計、舵角計(ラダー・エレベータ)、及びトルク計から構成されています。それぞれの出力を電圧測定用データロガ(KEYENCE
製のNR110)を、軽量化を目的にカバー、ディスプレイを取り外したLibretto70
に取り付け、100Hz
周期でサンプリングしました。トルク計測については秋月電子通商のデータロガPIC-ADC
を利用して13.84Hzのサンプリング周期で行ないました。(注1:データロガは電圧測定用のデータレコーダを指します。注2:PIC-ADC
付属のソフトの設定値を1000Hz にした時、13.84Hzでサンプリング可能です)

左・データの吸い上げ作業 右・対気速度計
ここでは必要パワーの測定に関して紹介します。従来トルク計測は、スリップリングを使った方法、電波等の非接触方式により外部記録装置で記録する方法により行われてきましたが、今回はノイズの低減、あまり高度な技術を必要としない事を狙い、歪みゲージ・増幅器とデータロガをプロペラのドライブシャフトに取り付けて計測しました。つまり計測装置と記録装置は、計測中はプロペラシャフトと一緒に回転しています(140rpm)。歪みゲージ用増幅器は、1ゲージ用の共立電子STR-1Nの抵抗を取り外し、歪みゲージに付け替えて4ゲージとしました。出力較正はペダルを固定し、重りをプロペラシャフトに取り付けた棒に吊ります。その時PIC-ADC
に出力される電圧を記録します。中心軸から、半径0.40m、0.55m、0.70mに荷重を作用させたトルクと無荷重時のデータを最小二乗法にて近似した1次式をトルク較正式としました。
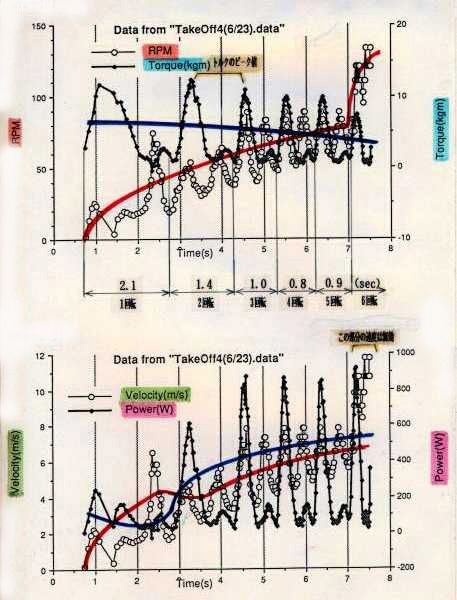
図6.1~図6.7にランニングテストで測定したジャンプのデータを示します。図6.1はトルクデータで、実線は重み付き移動平均のグラフです(注:時間軸はデータロガの計測開始からの時間で、機体が動きはじめからの時間ではありません)。図6.7の対気速度は較正データより線形領域が2m/s
以上のため、2m/s以下のデータは0m/sとしています。図6.1は低サンプリング周波数でありながら、ペダリング時の脈動によるサインカーブに近いデータが取得出来ています。ノイズも3000倍近い高ゲインでありながら、無負荷時のデータを見る限り誤差は0.36(Nm)程度に収まっているため、十分使用可能な領域であると推察できます。図6.1・6.2の11
秒付近を見ると明らかに挙動が違っています。ステップ応答的挙動を示している事から、ロープドライブからプロペラのみの加速に変化した時を示しています。図6.1と図6.2に示すデータより算出したパワー(図6.3)を見ると最大で420W、ジャンプ時には350W程度のパワーがプロペラに与えられています。対向風のない状態では離陸に必要な対地速度が大きくなり、今回のテストのように路面の悪い状態では、更に接地抵抗が大きくなります。総合的に判断すると、無風で路面の悪い状態でジャンピングクライム法で離陸するには、少なくとも250W~260W
のパワーの持続が必要と考えられます。
参考:パワー算出式は次式によります。
![]()
ここに、出力;P(watt)、トルク;T(Nm)、
設定ペダル回転数;Np(RPM)
設定ドライブシャフト回転数;ND(RPM)、
ペダル周り入力回転数;N(RPM)
要素技術-7 出発から離陸時の必要パワーの測定
離陸滑走時の必要パワーを測定する目的は、①駆動輪の摩擦、プロペラの推力および低レイノルズ数領域での揚力と空気抵抗等の影響により計算による値の推定が難しい必要パワーの測定
②コックピットの試作に伴うフレームやシート、ドライブユニットの設計への反映
③ペダリング速度によるギヤ比の最適化とロープドライブのギヤ比の決定
④必要パワー測定のパイロットの体力Trへの反映、等が有ります。
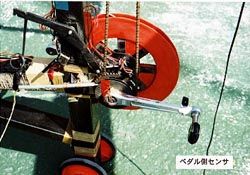
必要パワーの測定は、歪みゲージによる右足(または左足)によるペダルの曲げモーメントおよび光電センサによるペダルの回転数を測定し、これらの積を計算します。歪みゲージはペダルの曲げモーメントにより発生する歪み量に基づくアナログ電圧信号を電圧増幅カードで増幅し、データロガーに取り込みます。光電センサは、ペダルで回転するスプロケットの歯の有無を検出し、光の遮光による電圧のON/OFF(5V/0V)を同様にデータロガーに取り込んで同期したデータから必要パワーを計算します。速度(回転数)、トルクおよび必要パワーの測定結果の一例を図-7.1、表-7.1に示します。必要パワーの平均値は約220Wでした。ペダルに与えるトルクの変動周期はペダルを漕ぐ周期と一致し、1回転目或いは2回転目のピークがトルクの最大値であり、パイロットの負荷は始動時に大きいことがわかります。また回転数と速度は時間に比例して増加し、回転数については始動時ロープドライブ+プロペラドライブからプロペラドライブに転換していることがわかります。


測定装置

左・必要パワーの測定 右・測定データの吸い上げ
測定結果
要素技術-8.1 人力飛行機用フライトシミュレーター“Bird for CHicK-2000”の開発
練土研チャレンジチーム 乾 嘉行・吉田雄一
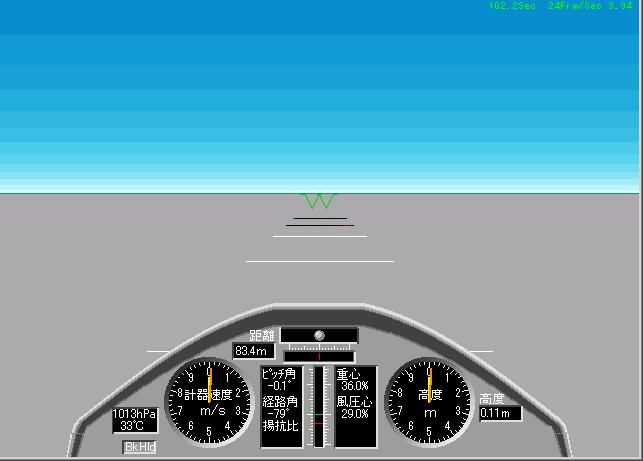
[bird]のコクピット画面
[bird]の機体の運動計算は、以下によります。概ね10点の質点を設定し、その点に掛かる力を計算し、三軸(Pitch,Yaw,Roll)の回転方向に生じる力を計算します。更に、その力を三軸各軸の慣性モーメントで除して各軸まわりの角加速度を算出します。その角加速度の単位時間(最低でも1/24秒)当たりの数値を加えていき角速度を算出し、角速度を加えていき角度を算出して機体の姿勢の変化をシミュレートして行きます。単位時間を大きくすれば、誤差が大きくなり計算結果が発散してしまうので単位時間は1/24秒以下に設定しています。プログラム自体は、約2000行のBasicのコードを1/24秒以下の時間で計算させると言う、近年のPCの能力向上を利用した力業による所産といえます。
ただし、機体姿勢のシミュレートに関しては上記の考え方では不足で、直行した2本の単位ベクトル(機体重心を通って前後方向に伸びるベクトル、同じく上下に伸びるベクトル)が計算された角速度で動いていくと言う考え方でシミュレートしています。この結果速度と高度があれば宙返りも可能になりました。
また、開発当初から我々の鳥人間コンテスト(解説-3)でのフライト経験や他チームの方の意見を踏まえ、常時アルゴリズムの改良を行って、再現性の向上には意を尽くしています。そういう意味で[bird]は経験の蓄積によって改良されているソフトといえます。
[bird]は計算の基礎となる式として仰角揚力曲線、仰角抗力曲線、仰角モーメント曲線を使用しています。これらの曲線を極力線形表現し瞬間瞬間の機体挙動を計算しています。今回CHicK-2000の失速特性を或る程度再現でき、操縦応答性も実機に似ることができたのは“アクティブギャルズ”さんからの詳細な基礎データの提供が有ったからに他なりません。風洞実験値や機体の各剛性値を導入したら何とか再現性が確保されたとも云えます。 “Bird for CHicK-2000”で新たに導入したのは2m高度のクリアーがわかるようなバーの表示を行ったことです。
要素技術-8.2 人力飛行機用フライトシミュレーター“Bird for CHicK-2000”の開発
練土研チャレンジチーム 乾 嘉行・吉田雄一
依頼目的はPIO対策と明確であったので、“Bird
for CHicK-2000”にもかねてから検討を続けていたアルゴリズムを採用した。
機体の姿勢解析は機体各部にかかる力を計算し、それが三軸に基づく回転にどのように影響するかを分析している。例えばピッチ角が0度、機首方位角が0度、バンク角が右へ45度の状態で重力加速度が無視できるほどの高Gで引き起こしを行なった場合、ピッチ角速度が30度/秒、ロール角速度が0度/秒だとしても、3秒後にはバンク角は右へ90度、機首方位角が90度、ピッチ角はプラス45度になる。更に、6秒後には機首方位角は180度、ピッチ角は0度、バンク角は背面である右へ135度に変化して行く。ピッチ角速度がバンク角にまで影響を与えていることになる。これは、単純に角速度の積分が角度になるという考え方では表現できない。機体重心を通って前方に伸びるベクトルと垂直上方に伸びる二本のベクトルの端点が力を受けて移動(回転)するが、そのなす角度は常に90度を保つという考え方を採用した(三角定規が回転するようなイメージ)。この考え方では、ピッチ角速度は双方のベクトルを移動(回転)させ、ヨー角速度は垂直のベクトルを軸に機体中心軸のベクトルを移動(回転)させ、更に、ロール角速度は機体中心軸ベクトルを軸にの垂直のベクトルを移動(回転)させることになる。これを双方のベクトルのなす角度を常に90度に保つようプログラムすることによって機体姿勢を表現している。この結果、機体の設定によっては宙返りが可能となった。
失速特性については“アクティブギャルズ”が実施した詳細な風洞実験データに負うところが多い。“Bird
for CHicK-2000”には風洞データから推論できる線形を導入し、1/24秒より速い解析を行わせたところ、失速特性が再現されたもので特別な処理を行ったわけではない。
担当としては、前夜のシミュレート練習だけで翌日見事にフライトさせたパイロットの勘の良さに驚いた、というのが素直な印象である。
"Bird for
CHicK-2000"
のダウンロードはここをクリック!!(559,046Bytes)
ファイルはLZHで圧縮してあります。適当な解凍ソフトを用いて解凍して使用してください。
詳しくは、展開したディレクトリ内に作成される、"Readme_Bird_for_Chick2000.txt"をお読みください。

